Publications
Autonomous navigation of the Kalman planetary rover

In a team building planetary rovers (AGH Space Systems), I focused on autonomous navigation and obstacle detection. We design and build Mars rover prototypes and compete in international robotics competitions that simulate real exploration missions. The project combines electronics, software, and science - all working together to create a robot capable of analyzing soil, and operating autonomously in unknown terrain.
Autonomous navigation of the Kalman planetary rover
S. Bednorz, I. Urbanik, Autonomous navigation of the Kalman planetary rover, II Student Space Conference, Wrocław, Poland, 20–21 Oct 2022, ISBN 978-83-7493-224-0, https://www.dbc.wroc.pl/dlibra/publication/156913
Kalman rover - electronics, software and science
S. Bednorz, M. Olszewski, M. Łagan, M. Gibiec, Kalman rover - electronics, software and science, Zeszyty STN, no. 38, pp. 156–164, 2022. Presented at the 59th AGH Student Research Conference, Kraków, Poland, https://badap.agh.edu.pl/publikacja/143553
Tech: Python, C++, ROS, Robotics, Autonomous Navigation
Tags: robotics, science, AGH Space Systems, conference
Space radiation data pipeline for ESA JUICE and ESA INTEGRAL missions.

I built a two-part software to streamline the analysis of space radiation data from the RADEM detector on ESA’s JUICE mission and the IREM aboard ESA’s INTEGRAL. The first component is a web application that automatically retrieves, processes, and presents new data through interactive dashboards for quick overview. The second is a Python library that standardizes raw datasets, enabling researchers to analyze measurements in a unified way. By automating common tasks, the platform reduces analysis time from hours to minutes.
Software assisting data analysis of space radiation in spacecraft missions
Bednorz, S., Pęczek, K., Grzanka, L., Swakoń, J., Galli, A., Sanchez-Cano, B., Barabash, S., Brandt, P., Wurz, P., Nénon, Q., Witasse, O., and Hajdas, W., Software assisting data analysis of space radiation in spacecraft missions., EGU General Assembly 2025, Vienna, Austria, 27 Apr–2 May 2025, EGU25-18339, https://doi.org/10.5194/egusphere-egu25-18339
RADEM on JUICE's first observations of the interplanetary radiation environment
Hajdas, W. and Galli, A. and the RADEM collaboration, RADEM on JUICE's first observations of the interplanetary radiation environment, EGU General Assembly 2024, Vienna, Austria, 14–19 Apr 2024, EGU24-15788, https://doi.org/10.5194/egusphere-egu24-15788
Two decades of space radiation environment observations with IREM monitor on INTEGRAL
Hajdas, W., Buehler, P., Galli, A., Xiao, H., Nieminen, P., Evans, H., Santin, G., Grzanka, L., Bednorz, S., Peczek, K., and Swakon, J., Two decades of space radiation environment observations with IREM monitor on INTEGRAL, EGU General Assembly 2025, Vienna, Austria, 27 Apr–2 May 2025, EGU25-15258, https://doi.org/10.5194/egusphere-egu25-15258
Tech: Python, Docker, Grafana, Prometheus, Jupyter
Tags: space radiation, conference poster
Projects
Kalman Rover Project



I spent 2 years as a software engineer on the Kalman planetary rover, working on autonomy and operations. I competed in IRC 2023 (1st place, India), URC 2023 (8th place, USA), and ERC 2022 & 2023 (2x 1st place, Europe). In 2024, I led the team to 1st place globally at URC and 2nd at ERC. I wrapped up my journey as an advisor at ARCh 2025 (Australia) - ending with another 1st place.
Tech: ROS 2, C++, Python, React, C
Tags: Robotics
Source:
https://github.com/agh-space-systems-rover
https://spacesystems.agh.edu.pl/en/projects/rovers/kalman-en/
https://www.youtube.com/watch?v=NGJDv5Osqtw
3D scanning head with 2D lidar
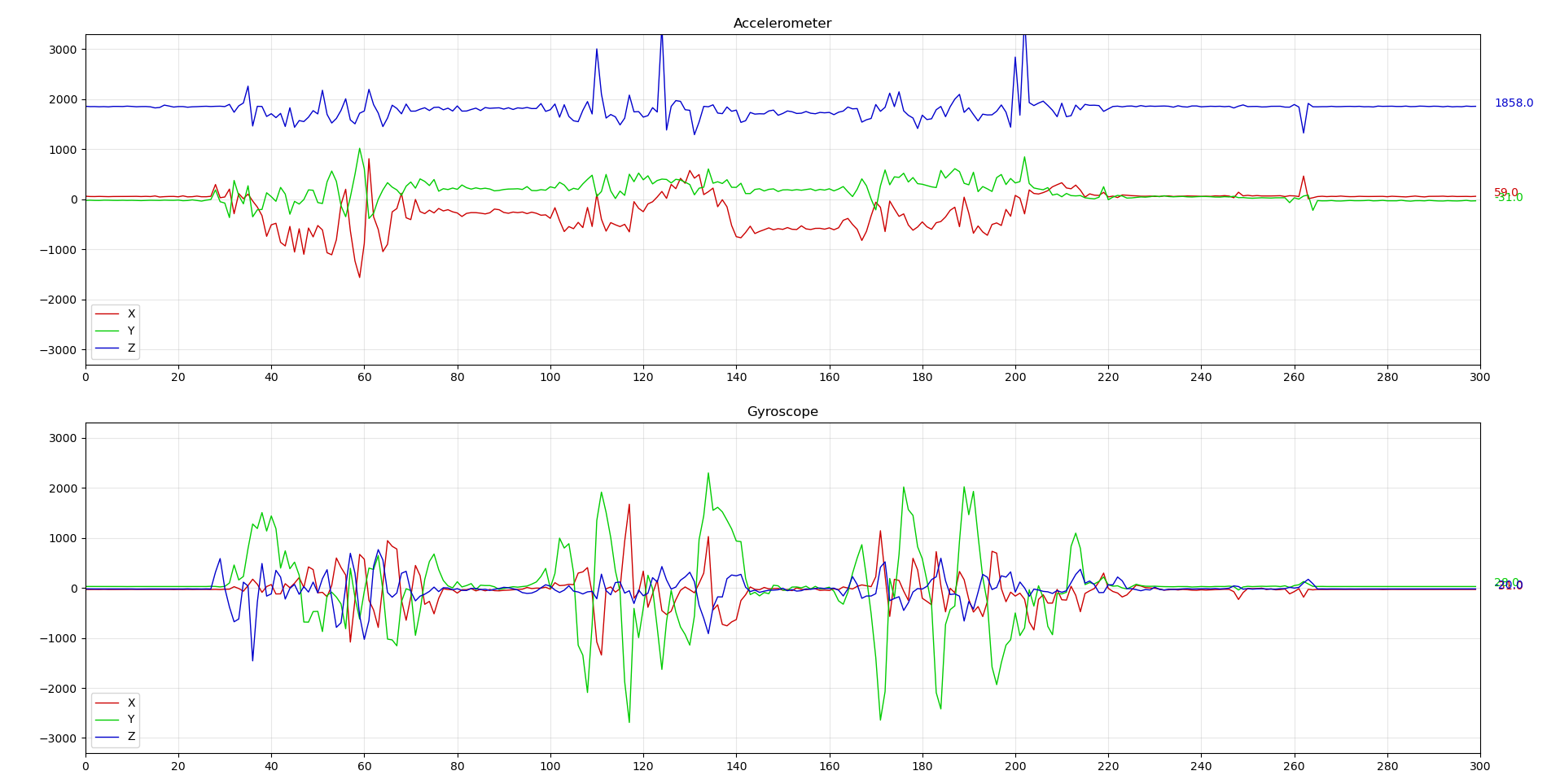
I built a DIY 3D scanning system that converts a 2D lidar into a 3D scanner using a rotating servo mechanism. The project includes custom firmware for AVR and STM32 microcontrollers, real-time visualization tools, and a complete software stack for processing and synchronizing lidar data. Features include IMU integration for improved accuracy and movement tracking.
Tech: C++, Go, Embedded C, RPlidar, Atmega328p, MPU-6050 / MPU-9250, STM32
Tags: 10k lines of code, Robotics, 3D scanning
Source:
https://github.com/dsonyy/lidar-2d-to-3d
Read more
Autonomously navigated robot

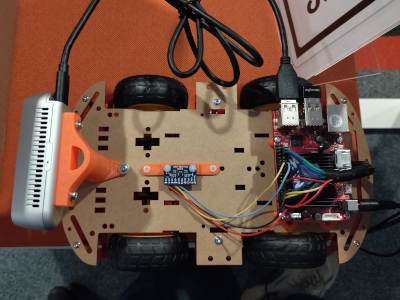
I built an autonomous navigation robot using ROS 2 with Nav2 for SLAM. The robot featured 4 wheels with 1 pair of encoders, an MPU-9250 IMU, a depth camera, and later a 2D lidar. It was powered by an Odroid C4 as its main computer and served as a platform for experiments and testing.
Tech: Python, C++, ROS 2, Nav2, Odroid C4, MPU-9250
Tags: 10k lines of code
3D object scanner
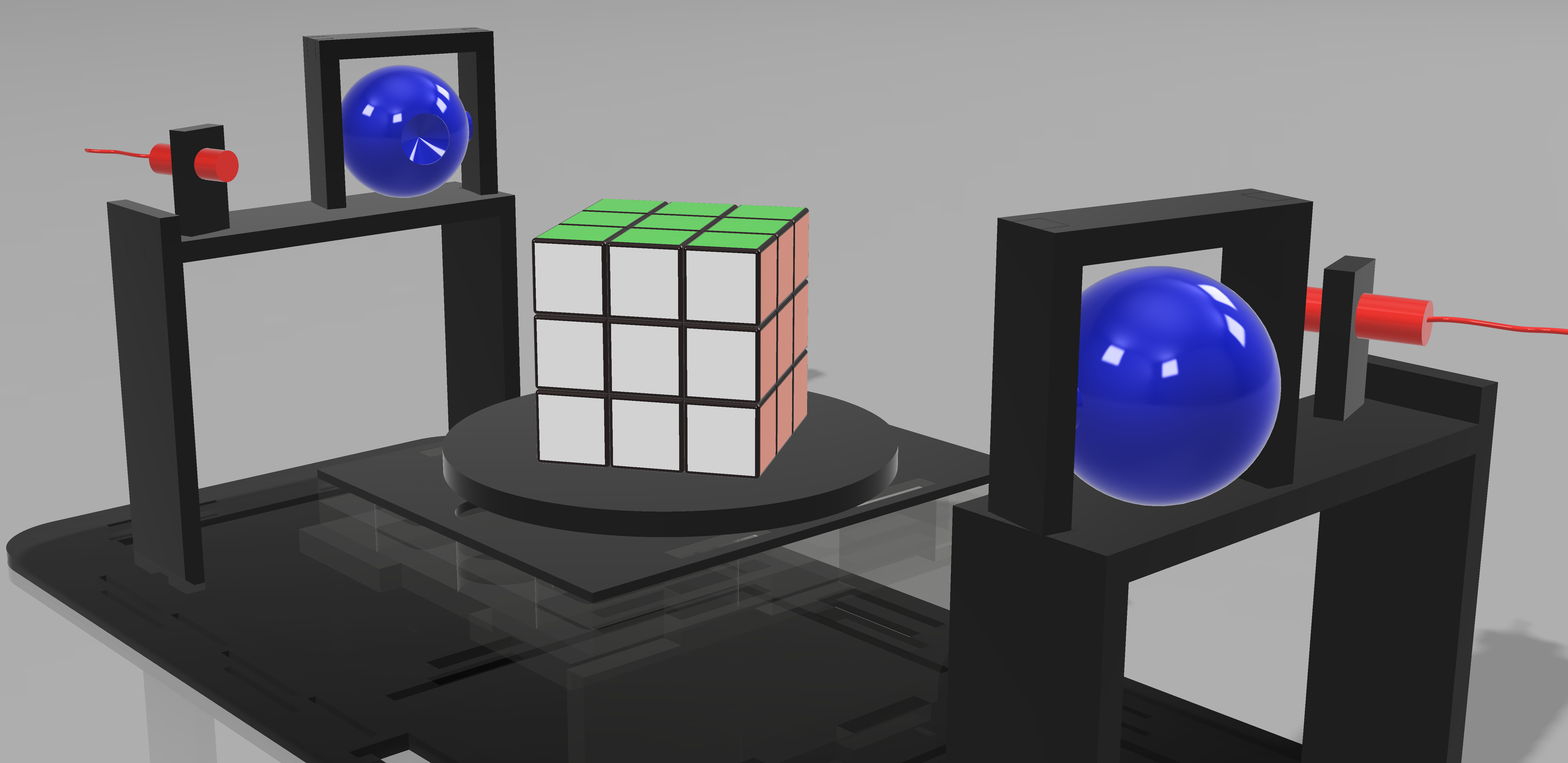

The idea was to build a device into which we put an object, press a button, wait a while, and receive a digitalized 3D model of the object. We used a set of 3 cheap webcams and 3 line laser pointers. When the laser turned on, the corresponding camera took a photo. Assuming the room is dark, the laser line is visible in the photo and is curved by the object. After some trigonometric calculations, we estimated the 3D coordinates of the scanned object.
Tech: Python, Raspberry Pi, Autodesk Fusion 360, 3D printing
Tags: 3D scanning, 3D printing, CoderDojo
Read more
Point cloud to gif
Utility to generate a rotating Gif image from a XYZ point cloud.
Tech: Python
Tags: <1k lines of code
Source:
https://github.com/dsonyy/point-cloud-to-gif
Read more
Long exposure machine
Using a 3D printer with a LED attached to the extruder to create long exposure photos.
Tech: Python, Raspberry Pi, 3D printer
Tags: <1k lines of code
Source:
https://github.com/dsonyy/light-printer
Read more
Interactive maps of science
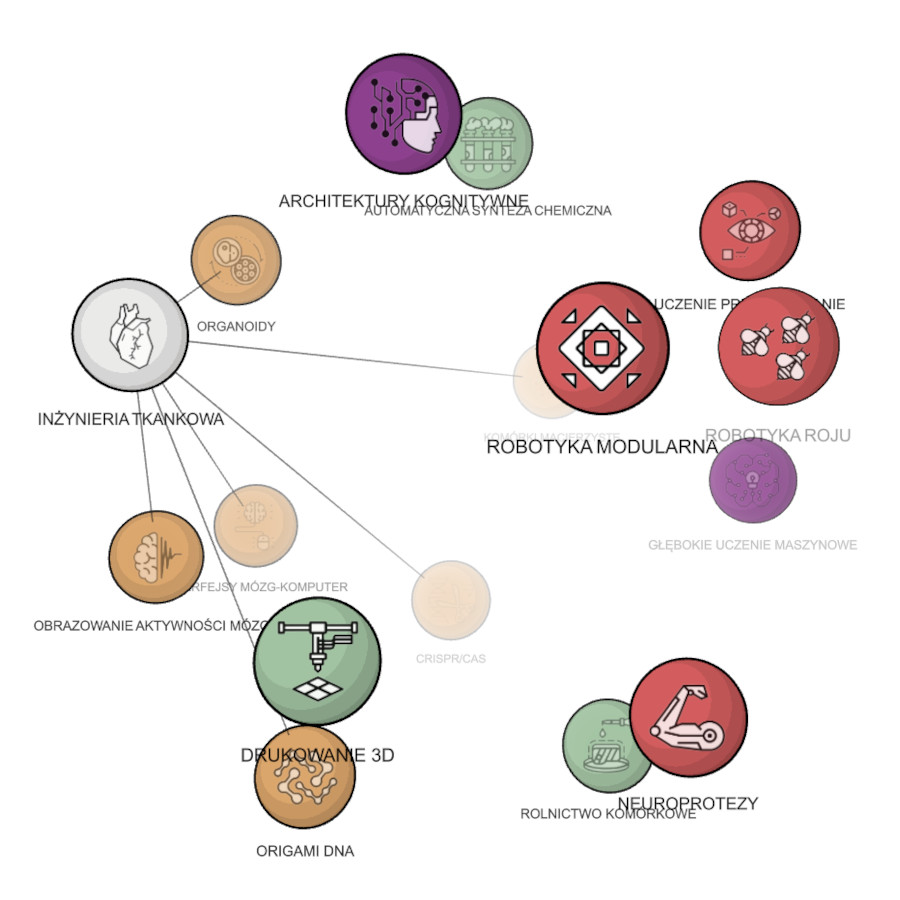
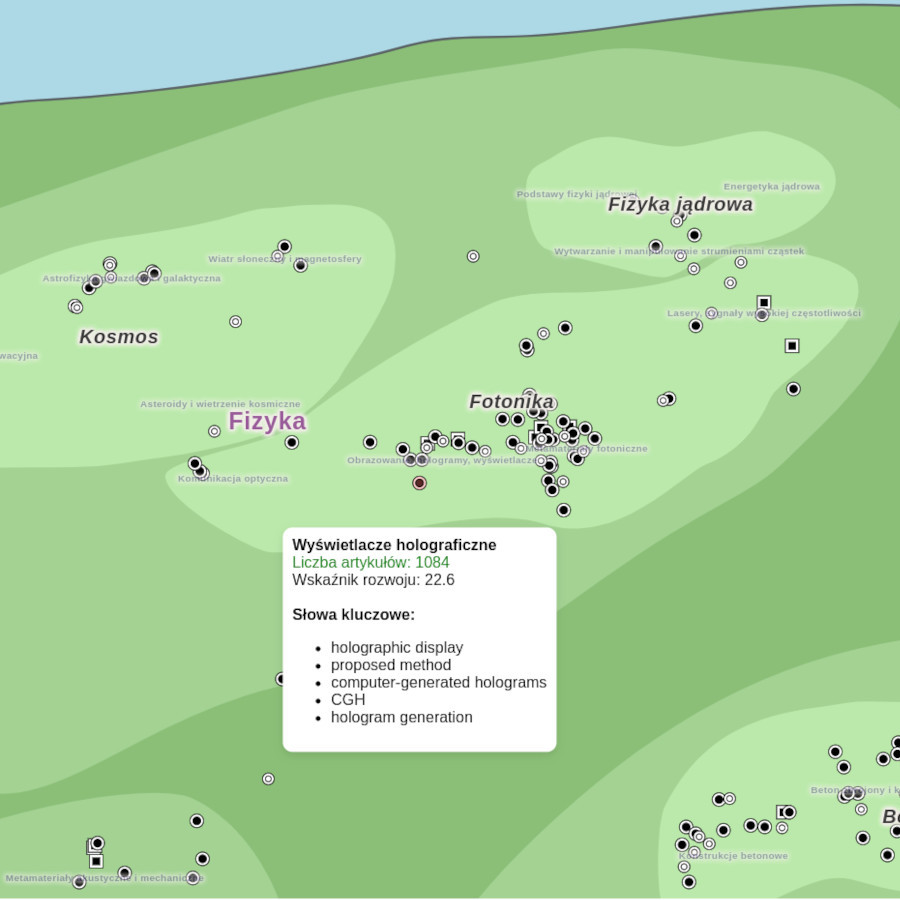
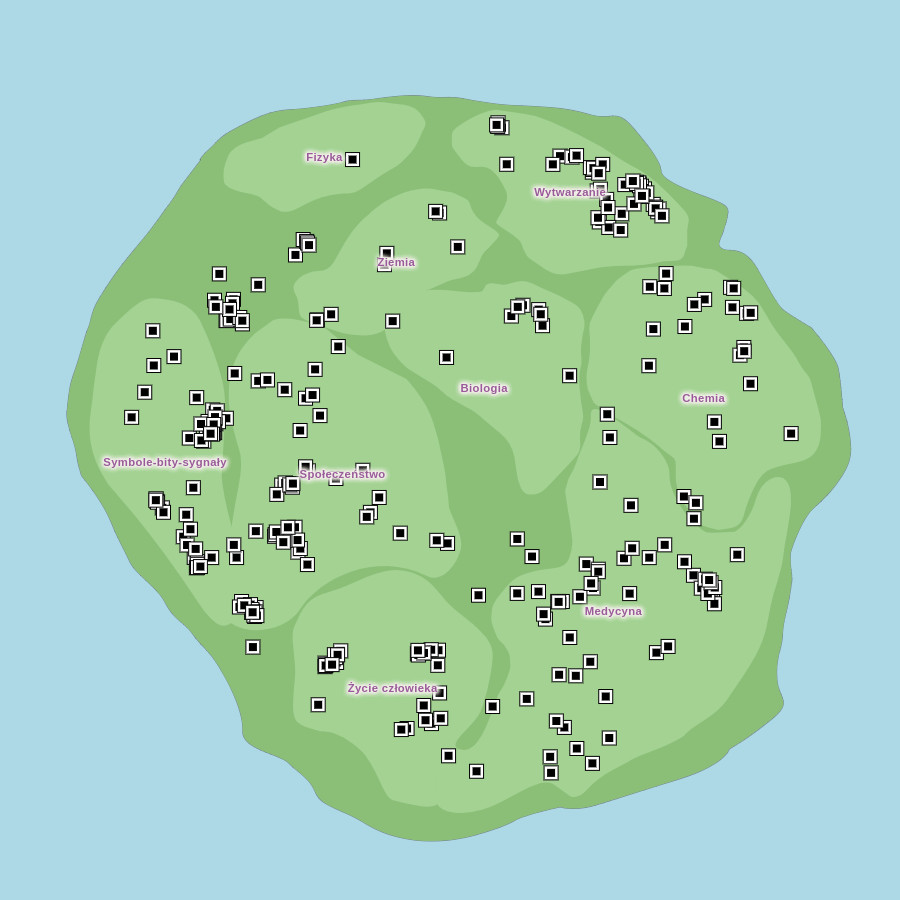
Proof of concept for visualizing technology-related papers as an interactive cloud. Navigate continents of scientific fields, dive into countries of subfields, and discover cities - whose size reflects the volume of research on each topic. The proximity of areas on the map mirrors how closely related the fields are.
Tech: JavaScript, HTML / CSS, D3.js, Three.js, Python (point processing)
Tags: science
Source:
https://dsonyy.github.io/map_of_science/
https://dsonyy.github.io/cloud-of-science/
Orchards control app


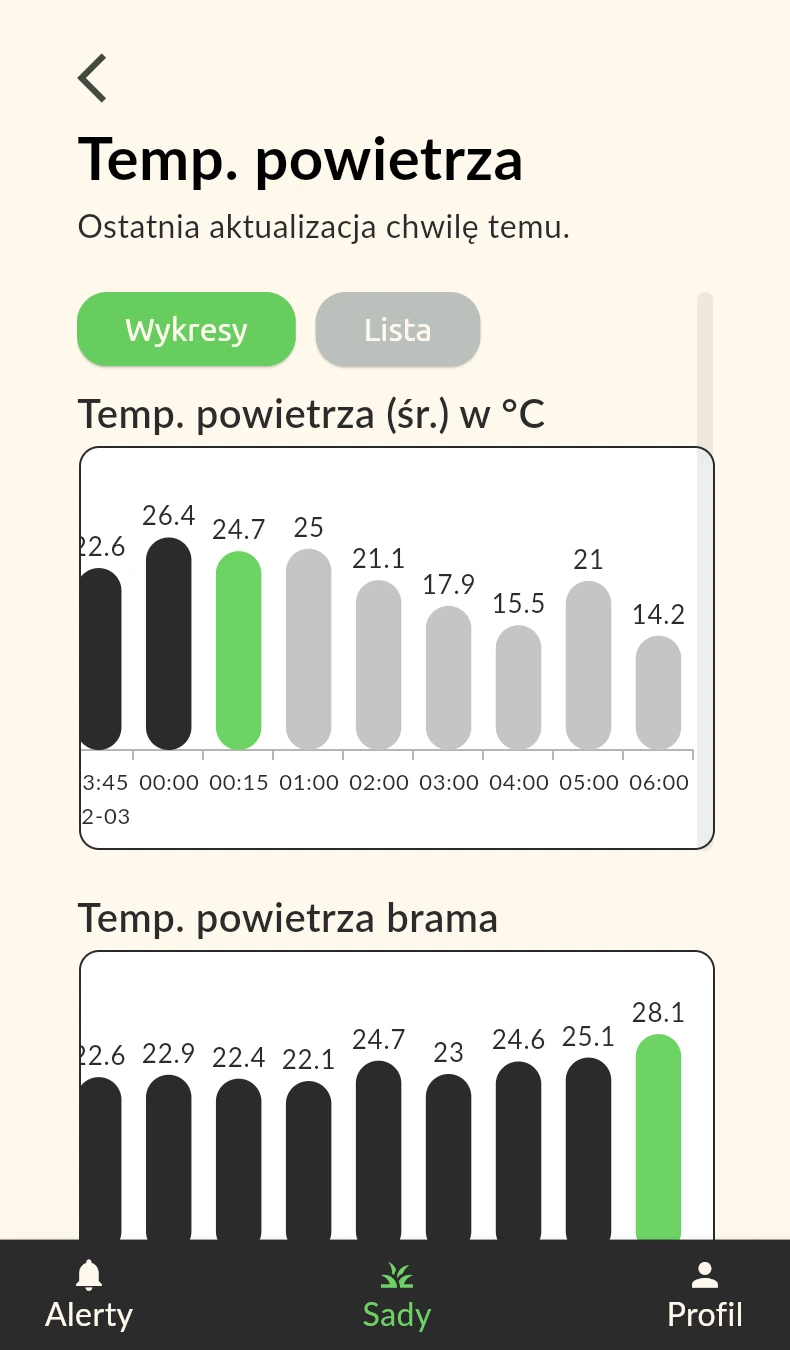
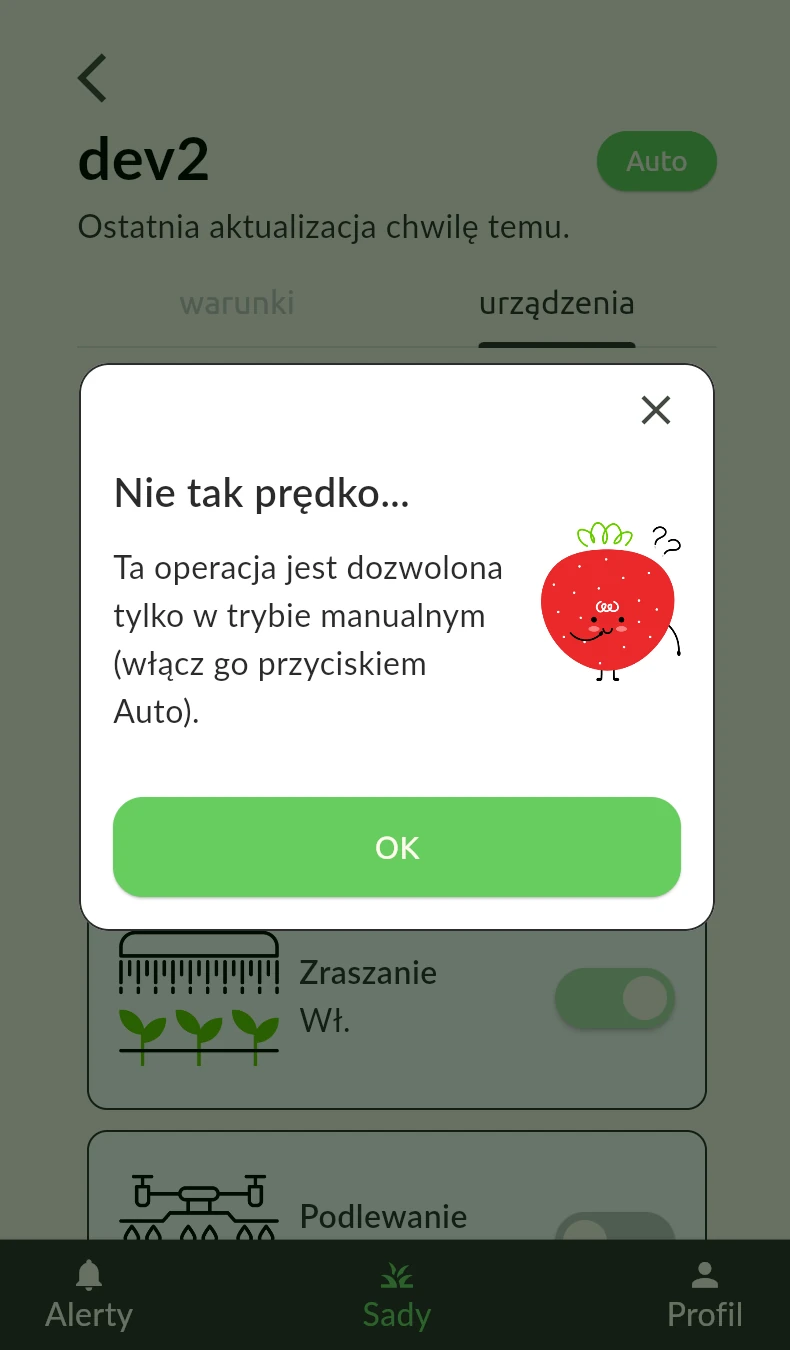
I built an app for remote control of orchards. The app allows to control the movement of a orchard mechanisms, collect data from sensors, and display the data in a user-friendly way.
Tech: Flutter
Tags: 10k lines of code, IoT, Mobile
Stereo vision with 2 web cameras

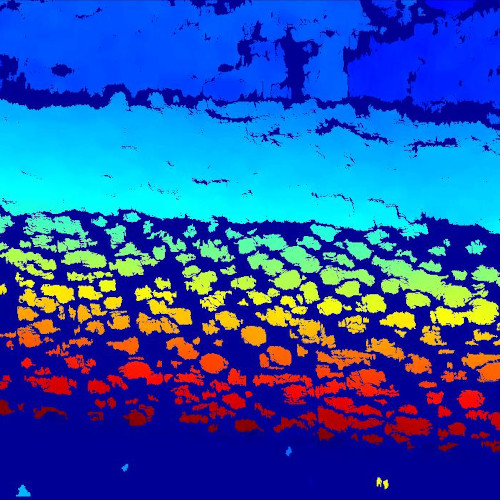
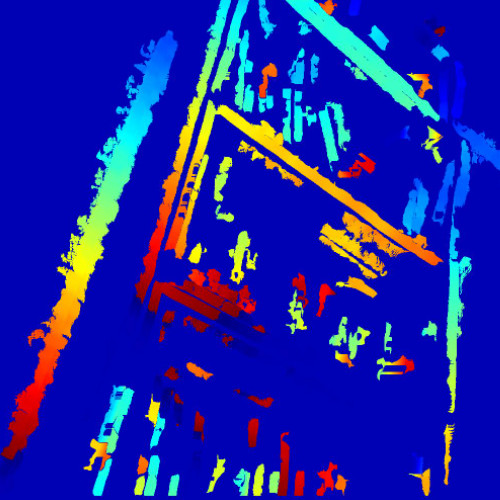
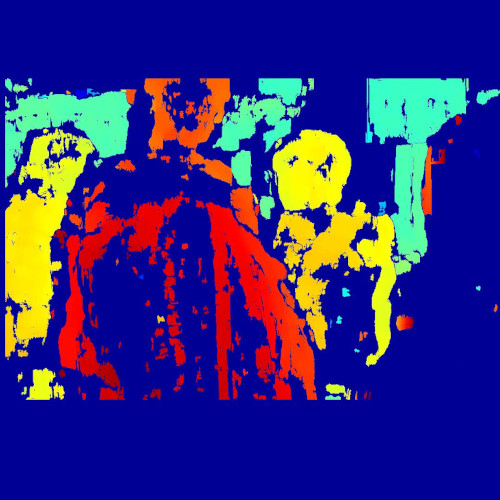
I built a stereo vision device using two web cameras and OpenCV-based software to generate a real-time depth image stream. This system can be used by other robots to detect and avoid obstacles.
Tech: Python, OpenCV, Raspberry Pi
Tags: computer, vision
Source:
https://github.com/dsonyy/stereo/
CleverHive Space
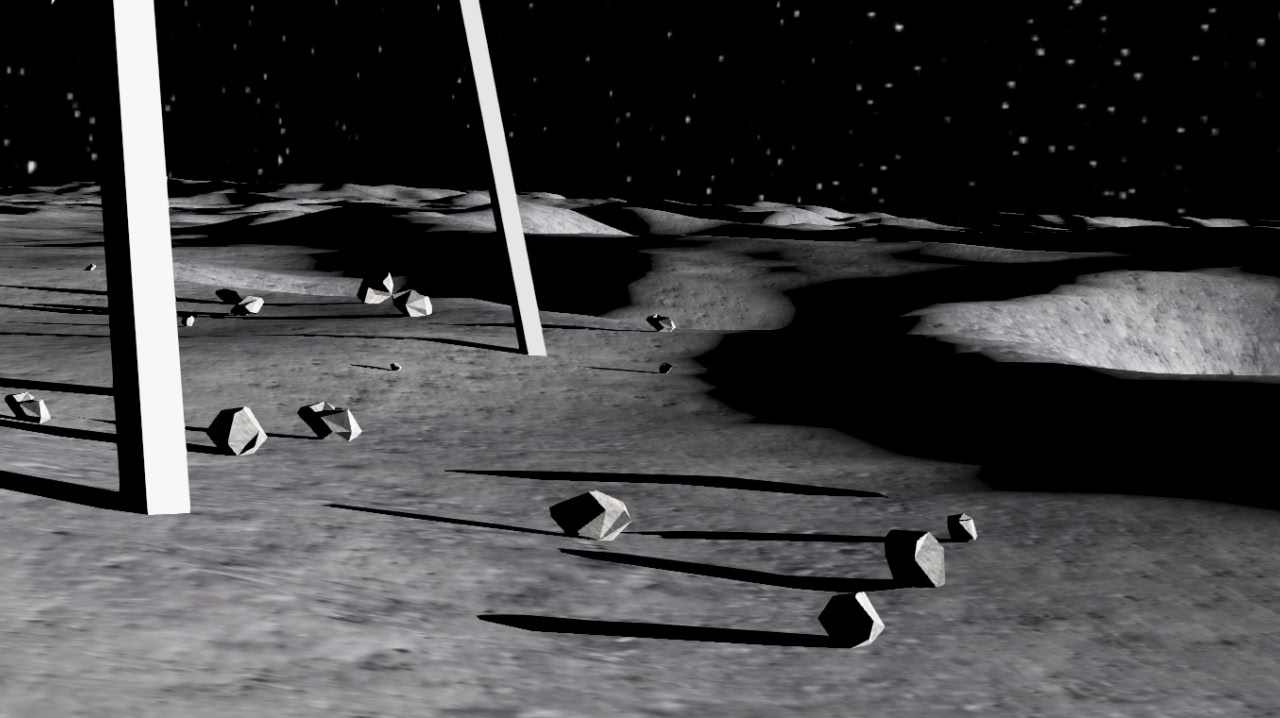
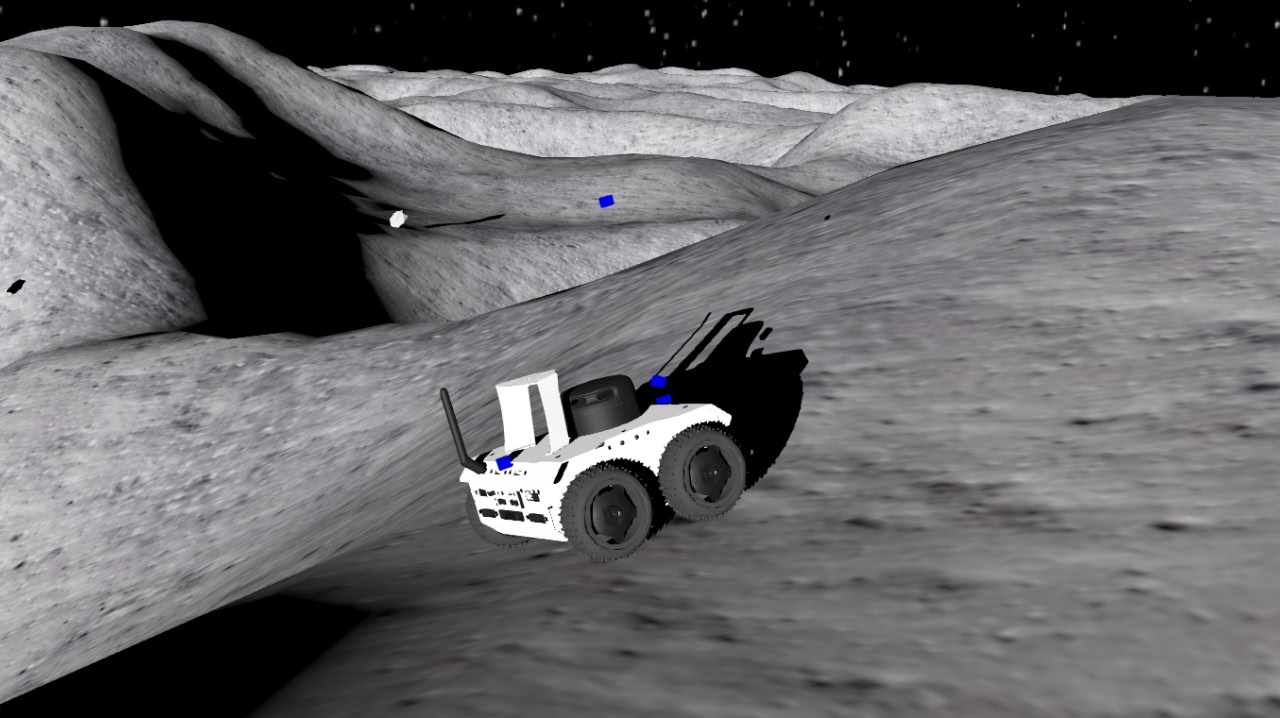
At CleverHive Space I build software to manage the next generation of Lunar rovers. Stay tuned.
Tags: space
Source:
https://cleverhive.space
Cool C++ projects

Games and utils created over the years.
Tags: c++
Source:
https://github.com/dsonyy/cpp-stuff
Cool Python projects
.png)
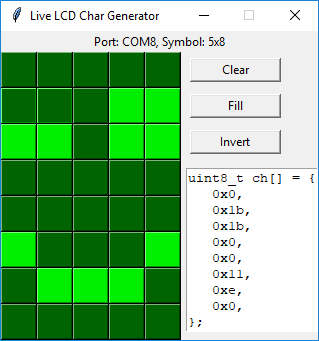
Games and utils created over the years.
Tags: python
Source:
https://github.com/dsonyy/python-stuff